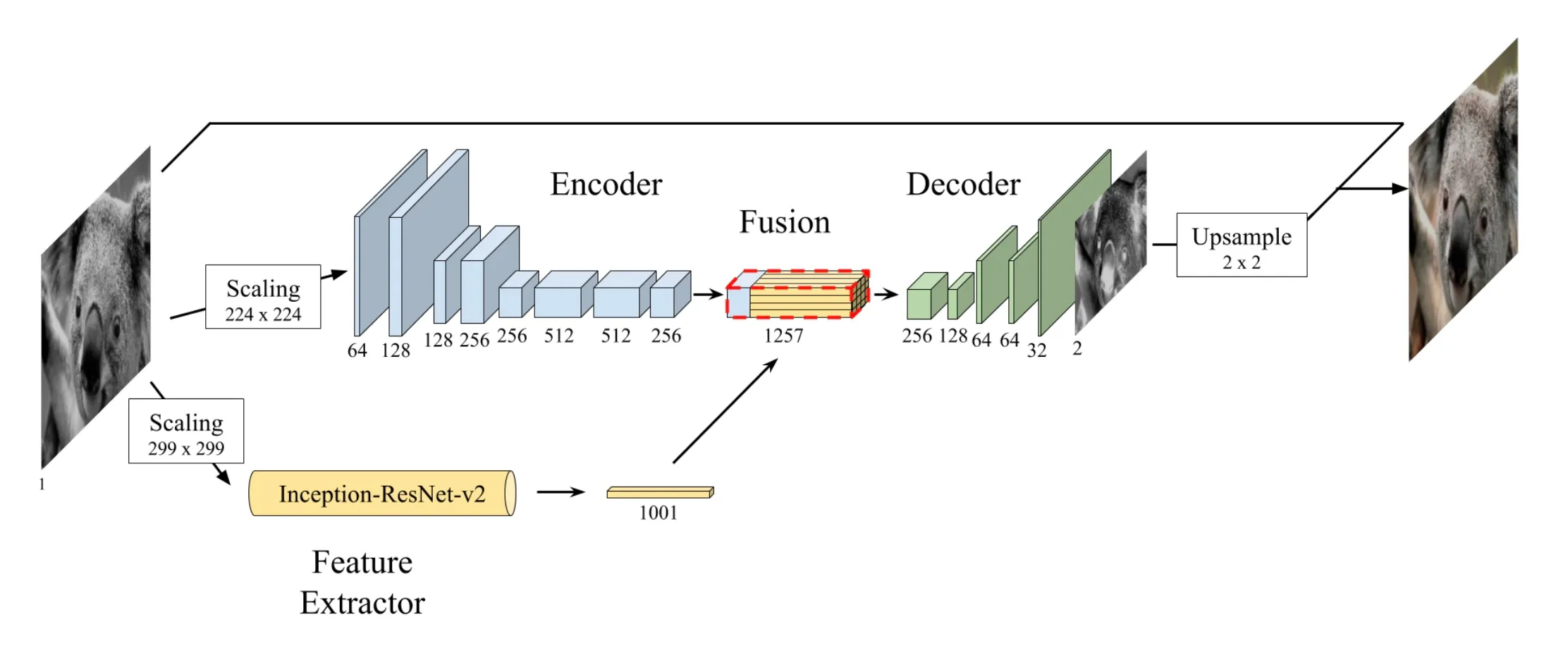
The goal of this project was to create a neural network to solve the problem of grayscale colorization, where an input grayscale image has missing channels amended such that we estimate a full color variant of the image. I opted to implement the model as detailed here.
- CNN encoder for initial feature extraction
- Additional feature extractor using a pre-trained Inception-ResNet-V2
- Fusion layer to combine both sets of features
- Decoder to upsample and estimate the output from the fused features
I enjoy this network as it combines many of the benefits of transfer learning with an additional bare network for fine tuning as the domain transfer will never be perfect with a pre-trained encoder. The paper linked prior goes into much more detail and was a great guide for my implementation, if you are interested I advise you read it.
Problem Statement
The problem if image colorization is quite an interesting one the simplifies into an elegant self-supervised problem. Given a grayscale image, can we estimate the additional color channels required to gave a full-color image. This sounds difficult at first but with some tweaks to the images, it’s quite easy to formulate this as a simple problem.
In the RGB color space, it’s hard to imagine how you may split the original image into a set of components, but if you convert the image to be in the LAB color space the problem can easily be modeled as a self-supervised problem. In the LAB color space, the L component is the grayscale component and the AB channels encode color information.
Converting our dataset images to the LAB color space, we easily get our input L channel and our ground truth AB channels! Therefore, the dataset requirements are just full-color images. The problem statement simplified as such, we are looking to estimate a function f such that:
Where will be our large convolutional net.
Dataset
I opted to use the places2 dataset as the context of colorizing an image of scenery or typical views from the human perspective are well captured in this dataset. As the dataset is very large and I had limited hardware to train on, I opted to subset the dataset into smaller splits.
from skimage import io
import os
# Create New Directories
for name in ['train', 'validation','test']:
path = "dataset/" + name + "/"
os.makedirs(path, exist_ok=True)I then split images from the validation set into specified counts for each split.
# Setting up Breakpoints
num_train = 1000
num_val = 200
num_test = 100
base_dir = './data/validation/'
files = os.listdir(base_dir)
index = 0
for i,image in enumerate(files):
test = io.imread(base_dir + image)
if test.ndim != 3:
continue
# Pick what folder to place image into
if i < num_train:
os.rename(base_dir + image, "./dataset/train/" + image)
elif i < (num_train + num_val):
os.rename(base_dir + image, "./dataset/validation/" + image)
elif i < (num_train + num_val + num_test):
os.rename(base_dir + image, "./dataset/test/" + image)
else:
break
index += 1Now that I have folders containing my data, I needed to work on a PyTorch dataset for data loading. There are a few things to consider when creating the dataloader.
- The input image is the grayscale channel (L channel in LAB space) so we’ll need to retrieve that component after converting the RGB dataset images
- The two other components (AB in LAB) are our ground truth output so we’ll also retrieve those as such
- Pre-Trained ResNet requires a different input image size than the base encoder
- We’ll need to resize the dataset images to have each variant
The following code achieves all of these goals and helps us bring all the necessary data.
# Torch dataloader likes having a class instance that represents the data
# We preprocess images here
# ref: https://pytorch.org/tutorials/beginner/data_loading_tutorial.html
# ref: https://discuss.pytorch.org/t/how-to-load-images-without-using-imagefolder/59999
from skimage.transform import resize
class ModelData(torch.utils.data.Dataset):
def __init__(self, base_dir):
self.base_dir = base_dir
self.all_imgs = os.listdir(base_dir)
def __len__(self):
return len(self.all_imgs)
def __getitem__(self, idx):
# Import Image and get LAB Image
img_name = os.path.join(self.base_dir, self.all_imgs[idx])
image = io.imread(img_name)
image = image / 255.0
lab = rgb2lab(image)
# L Channel
L = np.expand_dims(lab[:,:,0], axis=2)
L /= 50.0
L -= 1.0
# AB Channels
AB = lab[:,:,1:].transpose(2,0,1).astype(np.float32)
AB /= 128.0
# Scale For Inception
L_inc = resize(np.repeat(L,3,axis=2), (299, 299)).transpose(2,0,1).astype(np.float32)
# Scale for Encoder
L_enc = resize(np.repeat(L,3,axis=2), (256, 256)).transpose(2,0,1).astype(np.float32)
# Build Sample Dict.
sample = {"L":L.transpose(2,0,1).astype(np.float32),
"L_inc":L_inc, "L_enc":L_enc, "AB":AB,
"RGB": image}
return sampleThen it’s as simple retrieving the relevant categories of images and passing them through the PyTorch DataLoader.
# PyTorch Loaders for Train and Validation
# Get Dataset Objects
train_images = ModelData(base_dir="./dataset/train")
val_images = ModelData(base_dir="./dataset/validation")
test_images = ModelData(base_dir="./dataset/test")
# Pass Into Loaders
train_loader = torch.utils.data.DataLoader(train_images, batch_size=40, num_workers=2)
val_loader = torch.utils.data.DataLoader(val_images, batch_size=40, num_workers=2)
test_loader = torch.utils.data.DataLoader(test_images, batch_size=40)Now we have all of our required dataloaders to move forward with model construction.
Model Construction
Here I will discuss how I constructed the entire model as specified in the original paper.
Base Encoder
Here is where I construct the layers for the base encoder block. These layers will not be pre-trained and will help in refining results more specific to this dataset as opposed to the dataset the pre-trained net is based on. This is a simple CNN network so we can model it as a sequential model wrapped in a module API class.
class ImgEncoder(nn.Module):
def __init__(self):
super(ImgEncoder, self).__init__()
self.layers = nn.Sequential(
# Conv1
nn.Conv2d(3, 64, 3, stride=2, padding=1),
nn.ReLU(inplace=True),
nn.BatchNorm2d(64),
# Conv2
nn.Conv2d(64, 128, 3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.BatchNorm2d(128),
# Conv3
nn.Conv2d(128, 128, 3, stride=2, padding=1),
nn.ReLU(inplace=True),
nn.BatchNorm2d(128),
# Conv4
nn.Conv2d(128, 256, 3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.BatchNorm2d(256),
# Conv5
nn.Conv2d(256, 256, 3, stride=2, padding=1),
nn.ReLU(inplace=True),
nn.BatchNorm2d(256),
# Conv6
nn.Conv2d(256, 512, 3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.BatchNorm2d(512),
# Conv7
nn.Conv2d(512, 512, 3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.BatchNorm2d(512),
# Conv8
nn.Conv2d(512, 256, 3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.BatchNorm2d(256),
)
def forward(self, x):
return self.layers(x)Pre-Trained Encoder
The pre-trained encoder is quite simple, PyTorch has models available that are pre-trained on ImageNet so all we need to do is call an instance of the network.
import torchvision.models as models
inception = models.inception_v3(pretrained=True)Fusion
The fusion layer combines the features from the base encoder and the pre-trained encoder into a single input for the decoder network.
class ImgFusion(nn.Module):
def __init__(self):
super(ImgFusion, self).__init__()
# In practice nothing here
def forward(self, img1, img2):
img2 = torch.stack([torch.stack([img2],dim=2)],dim=3)
img2 = img2.repeat(1, 1, img1.shape[2], img1.shape[3])
return torch.cat((img1, img2),1)Decoder
The decoder is very similar to the encoder but in reverse, the number of channels reduces as the feature map sizes increase through the upsampling layers. This is where the encoded features from the base encoder and pre-trained encoder post fusion are used to estimate the AB channels.
class ImgDecoder(nn.Module):
def __init__(self):
super(ImgDecoder, self).__init__()
self.layers = nn.Sequential(
# Conv1
nn.Conv2d(256, 128, 3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.BatchNorm2d(128),
# Upsample1
nn.Upsample(scale_factor=2.0),
# Conv2
nn.Conv2d(128, 64, 3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.BatchNorm2d(64),
# Conv3
nn.Conv2d(64, 64, 3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.BatchNorm2d(64),
# Upsample2
nn.Upsample(scale_factor=2.0),
# Conv4
nn.Conv2d(64, 32, 3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.BatchNorm2d(32),
# Conv5
nn.Conv2d(32, 2, 3, stride=1, padding=1),
nn.Tanh(),
# Upsample3
nn.Upsample(scale_factor=2.0),
)
def forward(self, x):
return self.layers(x)Whole Network
Lastly, we just need to connect all the prior blocks into our whole network!
class ColorNet(nn.Module):
def __init__(self):
super(ColorNet, self).__init__()
self.encoder = ImgEncoder()
self.fusion = ImgFusion()
self.decoder = ImgDecoder(256)
self.post_fuse = nn.Conv2d(1256, 256, 1, stride=1, padding=0)
self.relu = nn.ReLU(inplace=True)
def forward(self, img1, img2):
# Encoder Output
out_enc = self.encoder(img1)
# Fusion
temp = self.fusion(out_enc, img2)
temp = self.post_fuse(temp)
temp = self.relu(temp)
return self.decoder(temp)Training
Here I will go over decisions made for training, results of training, and some issues I came across.
Optimizer
I chose to use the Adam optimizer with the following parameters:
| Parameter | Value |
|---|---|
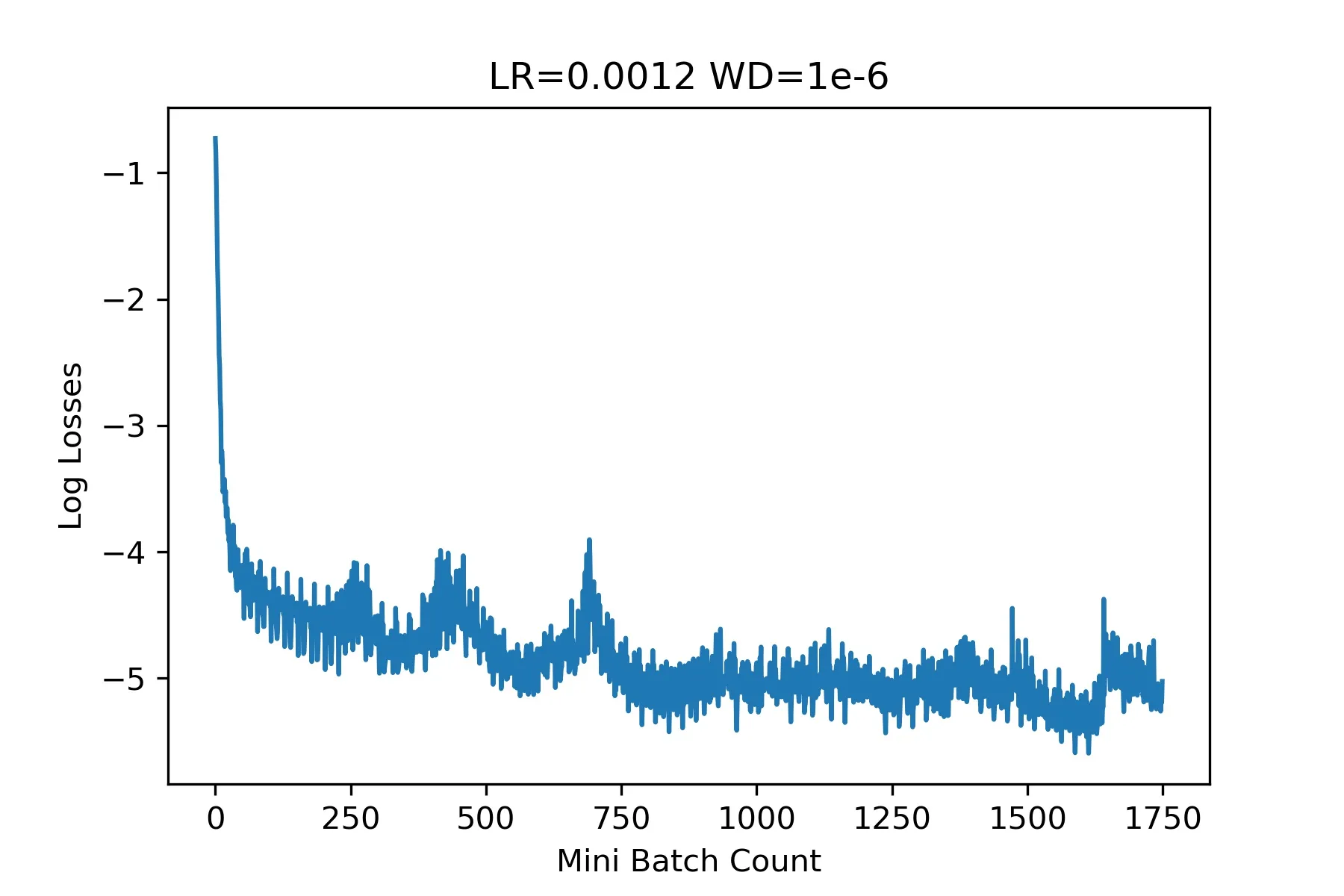
| Learning Rate | 0.0012 |
| Weight Decay | 1e-6 |
In PyTorch that looks like this:
import torch.optim as optim
optimizer = optim.Adam(model.parameters(), lr=0.0012, weight_decay=1e-6)Criterion
As we will be comparing the expected AB results with the ground truth we can use a simple MSE loss for this problem.
criterion = nn.MSELoss()Training Loop
Nothing too special here. Given the prior dataloaders we made it’s easy to enumerate over the loader and proceed with moving data to the GPU, running the forward pass, computing loss, and run an optimizer step. Sadly, given my hardware limitation I was not able to compute the validation loss during training which made backtracking to the best model impossible, I just had to assume training was at a reasonable point from the training loss.
epochs = 50
for i in range(epochs):
train_total_loss = 0
val_total_loss = 0
print("Epoch:", i+1)
model.train()
# Train
for i,data in enumerate(train_loader,0):
# Move Data to GPU
enc_in = data["L_enc"].cuda()
inc_in = data["L_inc"].cuda()
AB = data["AB"].cuda()
# Init. Optim. Params.
optimizer.zero_grad()
# Forward Prop.
# Get Inception Output
out_incept = inception(inc_in)
# Get Network AB
net_AB = model(enc_in, out_incept)
# Determine Loss
loss = criterion(net_AB, AB)
# Back Prop.
loss.backward()
# Update Weights
optimizer.step()
# Update Loss Saves
train_batch_loss.append(loss.item())
train_total_loss += loss.item()
train_epoch_loss.append(train_total_loss)
# Print Info Every Epoch
print("Train Loss: ", train_total_loss)
# print("Val. Loss: ", val_total_loss)Loss Results
The training loss was very interesting for this model, a shape I’ve never seen before. In hindsight, this seems like too large of a learning rate but I didn’t know better back then.
At the end of training a checkpoint is saved for us in inference later on.
checkpoint = {'model': ColorNet(),
'state_dict': model.state_dict(),
'optimizer' : optimizer.state_dict()}
torch.save(checkpoint, 'checkpoint.pth')And a little helper function to retrieve the model back.
def load_checkpoint(filepath):
checkpoint = torch.load(filepath)
model = checkpoint['model']
model.load_state_dict(checkpoint['state_dict'])
for parameter in model.parameters():
parameter.requires_grad = False
model.eval()
return model
model = load_checkpoint('checkpoint.pth')After that we can test some images!
Results
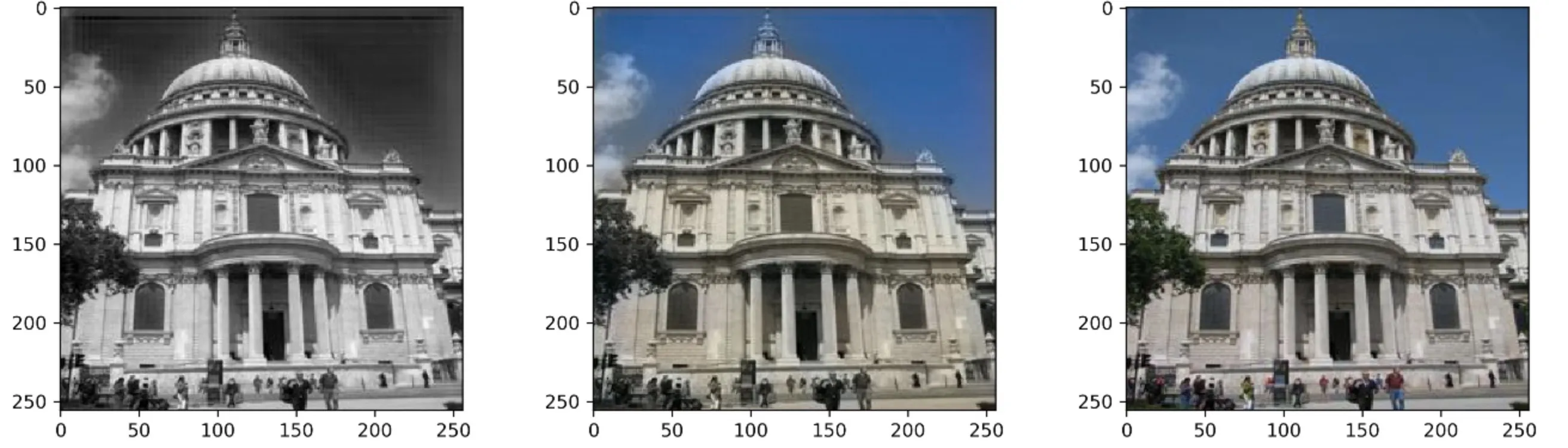
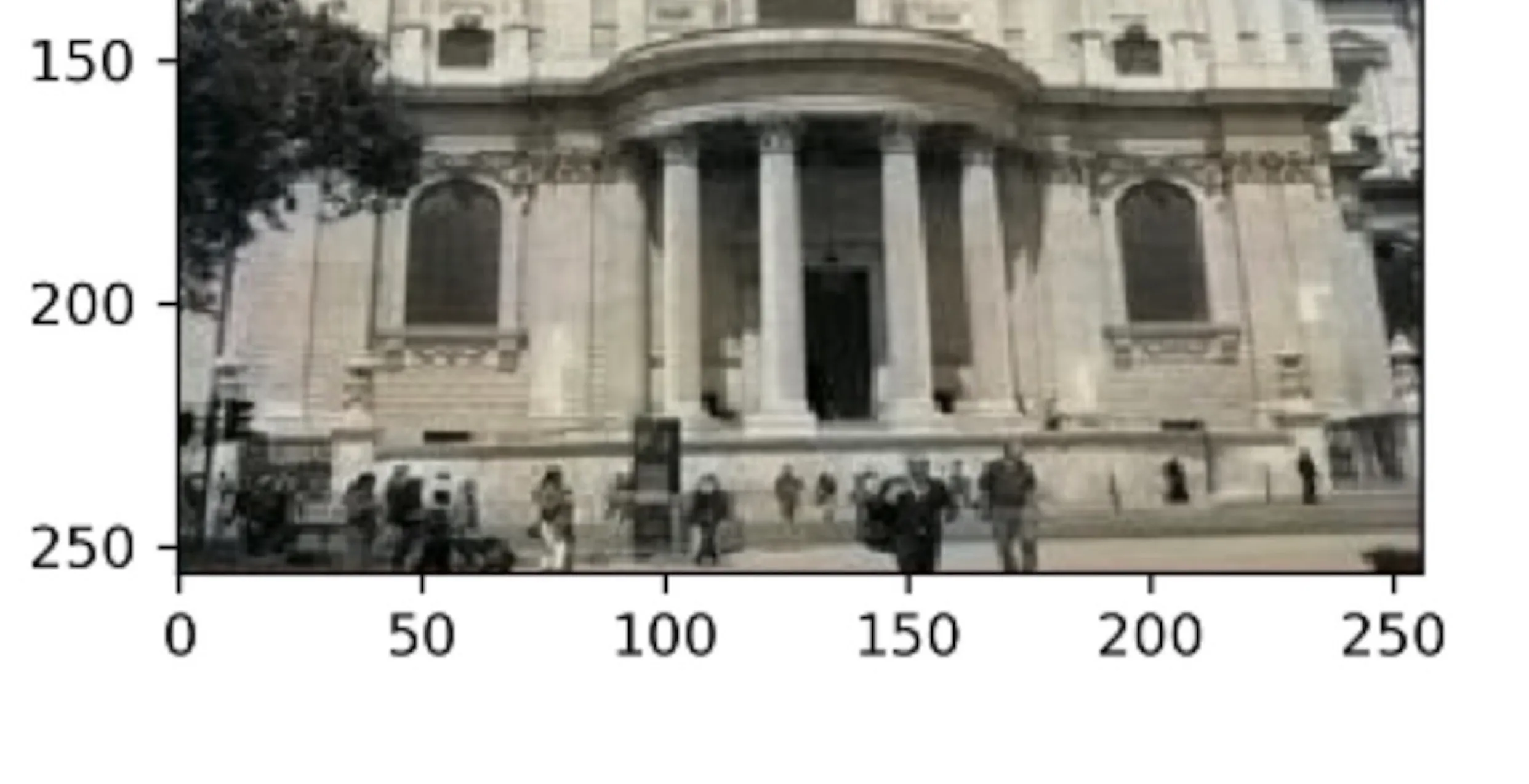
Below we see a set of sample images from the test set that were passed through the model. The left column are the input grayscale images, the center are the predicted images, and the right side are the original images. As we can see, this hardly passes the human eye but the performance isn’t too bad.
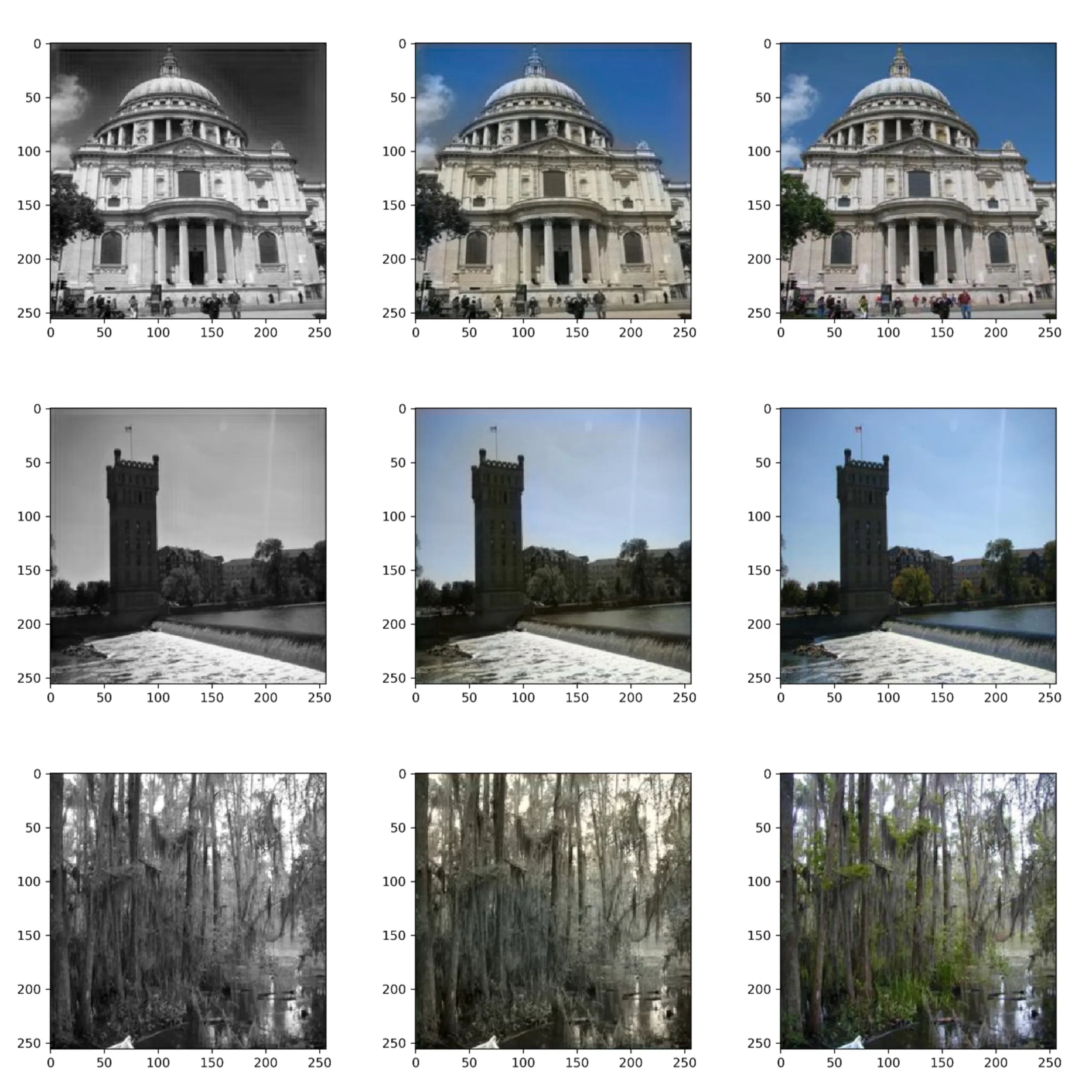
It’s interesting to start to characterize the performance. For example, consider the first row images of the building. The model does quite well on the sky and building color as buildings don’t come in too many colors so it’s easier to be more confident about what the color is. On the other hand, people’s clothing greatly vary in color and so it’s much more difficult to tell what color they should be.
Loss Problem
The MSE loss promotes predicting unsaturated colors for objects that are harder to tell. An intuitive way to think about this is considering two objects that look identical in grayscale bt vary in true color. The model could choose to be confident and choose a saturated color but if it’s wrong it’s VERY wrong. So to minimize MSE, the model is conservative and chooses median colors to represent objects of ambiguity. We see this as a fairly vibrant sky whereas the people are drab and gray.
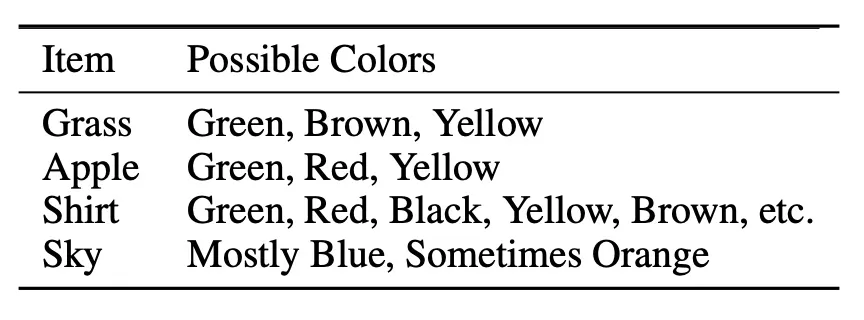
Another way to think about this is to consider what are the possible colors for a given object, we see those that are well-defined are more vibrant whereas others are not as vibrant.
The real solution is a loss that allows for many possibilities for a given object as opposed to dictating a single correct solution. Such losses exist, but I did not implement it.